Моделирование полета одновинтового вертолета под управлением позиционно-траекторного регулятора
Аннотация
Дата поступления статьи: 07.06.2013В статье приведен синтез траекторного регулятора для мини-вертолета. Предложен метод проведения полунатурных испытаний системы управления вертолета с применением симулятора летающих моделей AerosimRC. Приведены результаты симуляции. Обозначены задачи для применения данного метода.
Ключевые слова: позиционно-траекторный регулятор, вертолет, моделирование, симуляция, алгоритмы.
05.13.18 - Математическое моделирование, численные методы и комплексы программ
Введение
Проектирование системы управления роботизированным мини-вертолетом с применением алгоритмов позиционно-траекторного управления включает в себя пять основных этапов: получение и верификация математической модели движения вертолета, синтез алгоритмов управления, моделирование, разработка программного обеспечения и аппаратной платформы, экспериментальное исследование [1, 2].
В данной работе рассматривается синтез алгоритмов управления и моделирование полета одновинтового мини-вертолета с использованием симулятора AerosimRC.
Математическая модель вертолета
Математическая модель движения мини-вертолета построена на основе уравнений динамики твердого тела и может быть записана в следующем виде:
![]() (1)
(1)
![]() (2)
(2)
Где X - m-вектор внутренних координат; M - (mxm)-матрица массо-инерционных параметров, элементами которой являются масса, моменты инерции и присоединенные массы мини-вертолета; Fu - m-вектор управляющих сил и моментов; Fd - m-вектор нелинейных элементов динамики мини-вертолета; ![]() - m-вектор оценки измеряемых и неизмеряемых внешних возмущений; Y - n-вектор положения и ориентации связанной системы координат относительно базовой, R - n-вектор кинематических связей, в него входят: вектор линейных скоростей связанной системы координат относительно базовой и вектор угловых скоростей связанной системы координат относительно базовой.
- m-вектор оценки измеряемых и неизмеряемых внешних возмущений; Y - n-вектор положения и ориентации связанной системы координат относительно базовой, R - n-вектор кинематических связей, в него входят: вектор линейных скоростей связанной системы координат относительно базовой и вектор угловых скоростей связанной системы координат относительно базовой.
Для проектирования системы управления робота-вертолета предлагается применить алгоритмы позиционно-траекторного управления, изложенные в [1]. Одним из преимуществ предлагаемого подхода является возможность использования многосвязных систем нелинейных дифференциальных уравнений. Это позволяет отказаться от линеаризации, разделения движений по плоскостям и необходимости составления уравнений для каждого режима работы одновинтового вертолета, учесть сложный характер его динамики.
Синтез регулятора
Рассмотрим синтез траекторного регулятора для полета вертолета по прямолинейной траектории. Математическая модель движения вертолета описана уравнениями (1), (2). Пусть вертолет на высоте H = 20 м движется по прямой, угол тангажа ϑ = -5°, угол крена γ = 0°, курс φ = 45°. В этом случае траектория задается многообразием:
![]()
Где y – вектор начальных условий, A1, A2 - матрицы коэффициентов; x0, y0, z0 - линейные координаты положения объекта в пространстве.
Зададим многообразие по скорости в земной системе координат:
![]()
![]()
В связанной системе координат:![]()
Пусть желаемая скорость по оси OX Vx = 5 м/с. A3, A4 - матрицы коэффициентов; X - вектор внутренних координат.
Алгоритм управления описывается уравнением:![]() (3)
(3)
T1,T2 - матрицы коэффициентов, задают время переходных процессов. Fd, ![]() - имеют тот же смысл, что и в (2).
- имеют тот же смысл, что и в (2).
На рисунке 1 приведена траектория движения вертолета с использованием полученного алгоритма управления (3).
Аналогично изменяя коэффициенты квадратичной формы мы можем задавать любые траектории движения. Моделирование приведенного примера проведено в пакете численных вычислений Matlab [3, 4].
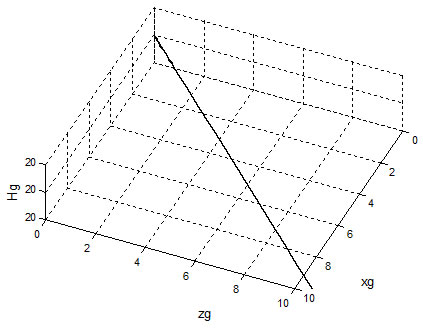
Рис. 1. – Траектория полета вертолета в Matlab
Моделирование в симуляторе AerosimRC
На практике, для проверки системы управления мини-вертолета этого бывает недостаточно, т.к. мы не имеем полного представления о математической модели реального вертолета. Подобная ситуация возникает при использовании сторонних симуляторов. Модель вертолета в симуляторе AerosimRC базируется на уравнениях твердого тела, известны массо-инерционные характеристики, аэродинамические параметры и т.д. Структура подключения системы управления к симулятору приведена на рисунке 2.
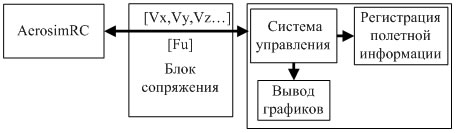
Рис. 2. – Структура подключения системы управления к симулятору
Как показано на рисунке 2 структурная схема системы состоит из трех блоков: блока симулятора, блока сопряжения и блока бортового ПК. В блоке симулятора производится моделирование движения вертолета, просчитывается влияние внешней среды (боковой ветер, термики и т.д.). Блок сопряжения отвечает за обмен информационными пакетами между симулятором и бортовым ПК. Блок бортового ПК – это бортовой компьютер мини-вертолета.
Симулятор передает полетные данные (линейные и угловые скорости, угловые координаты положения вертолета в пространстве, данные с GPS, высоту и т.д.) через блок сопряжения на блок бортового ПК. Бортовой ПК обрабатывает эти пакеты по аналогии с выходными данными от системы навигации на борту реального вертолета. В блоке бортового ПК вычисляются управляющие воздействия. Для этого используются алгоритмы позиционно-траекторного управления. Полученные управляющие воздействия через блок сопряжения передаются на симулятор. Они могут быть представлены в виде ШИМ сигналов, отправляемых непосредственно на исполнительные механизмы мини-вертолета, либо в виде управляющих воздействий формируемых аппаратурой радиоуправления.
Для отработки взлета вертолета в симуляторе AerosimRC применен позиционный регулятор и обратные преобразования для пересчета управляющих сил и моментов в управляющие координаты. Для учета погрешностей, допущенных при получении математической модели движений вертолета, а так же для учета неизмеряемых внешних возмущений используются нелинейные наблюдатели [5, 6, 7]:
![]()
Где L – диагональная матрица с постоянными положительными коэффициентами, обеспечивающая асимптотическую устойчивость процесса оценивания, F – аналитическая оценка внешних сил, – оценка неизмеряемых внешних сил и моментов, – вспомогательная переменная.
Полученные оценки неизмеряемых внешних сил и моментов входят в уравнения (2), (12).
Характеристики мини-вертолета: масса m = 3 кг, длина l = 635 мм, высота h = 230 мм, диаметр НВ D = 1245 мм.
Полетное задание: начальные координаты точки взлета вертолета x0 = -299 м, y0 = 482 м, z0 = 82 м, координаты конечной точки x = 307 м, y = 507 м, z = 87 м. Настройки симулятора AerosimRC: ветер 0 м/с, турбулентность 0%. Требования по скорости подъема не заданы. Полетные данные регистрируются с частотой 50 Гц. Результаты моделирования приведены на рисунке 3. Визуализация полета на рисунке 4.
Заключение
На этапе создания системы управления на базе позиционно-траекторных алгоритмов моделирование с применением HIL симуляции (англ. "hardware-in-the-loop" – моделирование работы замкнутой системы с применением аппаратного обеспечения в контуре) позволяет проверить методы обработки экспериментальных данных, работу отдельных модулей, а также эффективность автопилота при решении поставленных задач в нормальных и экстремальных условиях [8, 9, 10, 11].
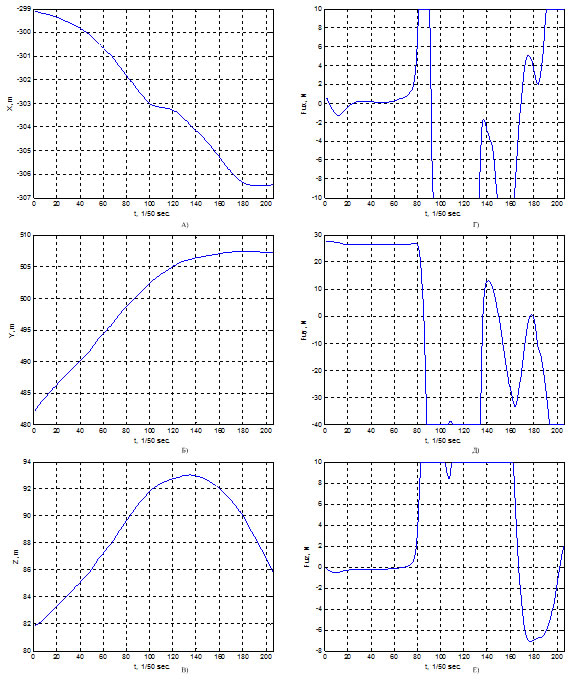
Рис. 3. – Графики проекций управляющих сил и координаты траектории полета мини-вертолета в земной системе координат; А) движение по оси Ox, Б) движение по оси Oy, В) движение по оси Oz; Г) проекция Fux; Д) проекция Fuy; Е) проекция Fuz
Такой подход на этапе тестирования системы управления позволяет с минимальными экономическими затратами и с максимальной безопасностью для персонала провести предполетное исследование и отладку, выявить программные ошибки, обнаружить возможные сбои аппаратного обеспечения.

Рис. 4. – Вид в окне симулятора
Литература:
- Пшихопов, В.Х. Позиционно-траекторное управление подвижными объектами [Текст]: Монография / В.Х. Пшихопов. – Таганрог: Изд-во ТТИ ЮФУ, 2009. – 183 c.
- Pshichopov V.Kh., Sergeev N.E., Medvedev M.Y., Kulchenko A.E. Helicopter autopilot design [Электронный ресурс] // SAE 2012 Aerospace Electronics and Avionics Systems Conference, 2012, – Режим доступа: http://papers.sae.org/2012-01-2098/ (доступ: 24$) – Загл. с экрана. – Яз. англ.
- Кульченко А.Е. Программно - аппаратный моделирующий комплекс для робота - вертолета [Текст] // Известия Кабардино-Балкарского научного центра РАН, 2010. – С.15-19.
- Кульченко А.Е., Федоренко Р.В. Структурно-алгоритмическая организация системы управления БПЛА на базе мини-вертолета [Текст] // Перспективные системы и задачи управления: материалы Пятой Всероссийской научно-практической конференции, 2010. – С. 135-139.
- Пшихопов, В.Х. Оценивание и управление в сложных динамических системах [Текст] / В.Х. Пшихопов, М.Ю. Медведев. – М.: Физматлит, 2009. – 295 с.
- Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов с оцениванием возмущений [Текст] // Информационно-измерительные и управляющие системы, 2006. – №1. – С.103-109.
- Федоренко Р.В. Алгоритмы автопилота посадки роботизированного дирижабля [Электронный ресурс] // "Инженерный вестник Дона", 2011, №1. – Режим доступа: http://www.ivdon.ru/magazine/archive/n1y2011/371 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Пшихопов В.Х., Сергеев Н.Е., Медведев М.Ю., Кульченко А.Е. Алгоритм обработки данных в задаче идентификации параметров мини-вертолета Caliber v90 [Текст] // Перспективные системы и задачи управления. Материалы Седьмой Всероссийской научно-практической конференции , 2012. – С. 58-65.
- Кульченко А.Е. Алгоритмы функционирования автопилота робота-вертолета [Электронный ресурс] // "Инженерный вестник Дона", 2011, №1. – Режим доступа: http://ivdon.ru/magazine/archive/n1y2011/330 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Saripalli S. Landing a Helicopter on a Moving Target [Текст] // Robotics and Automation. IEEE International Conference, 2007, pp. 2030 - 2035.
- Gavrilets V., Martinos I., Mettler B., Feron E. Control logic for automated aerobatic flight of miniature helicopter [Текст] // Navigation and Control Conference. AIAA Guidance, 2002, pp. 385-394.