Погрешность определения угла местоположения источника звука микрофонной системой с алгоритмом пространственно-временной обработки сигнала
Аннотация
Для ранее предложенной микрофонной системы с адаптивным алгоритмом управления характеристикой направленности исследована погрешность определения угла положения источника звука. Получены зависимости абсолютной погрешности от угла прихода сигнала источника звука, определяемые разбросом чувствительностей направленных микрофонов системы.
Ключевые слова: адаптивный алгоритм, микрофонная система, погрешность локализации, управление характеристикой направленности, направленный микрофон, пространственно-временная обработка
В настоящее время широкое распространение получила пространственно-временная обработка сигналов во многих областях науки и техники. Ее использование позволило достичь существенного повышения эффективности телекоммуникационных и локационных систем [1]. Одним из направлений применения такой обработки являются системы обработки и преобразования акустических сигналов на основе набора (решетки) микрофонов, разнесенных в пространстве и обеспечивающих формирование характеристик направленности (ХН), а также управление на основе совместной обработки сигналов на их выходах. На основе таких алгоритмов также могут строится системы определения местоположения (локализации) источника звука (ИЗ) в пространстве. В этом случае информация о положении ИЗ может содержаться в весовых коэффициентах, полученных на основе применяемых алгоритмов пространственно-временной обработки сигналов [1 – 3].
Задачи локализации ИЗ также решаются за счет систем под названием TDOA (Time-Difference-Of-Arrival - разность времени прихода сигнала). В большинстве случаев они состоят из двух ненаправленных микрофонных капсюлей (приемников давления), разнесенных на расстоянии около 100 мм друг от друга. Локализация ИЗ в таких системах осуществляется путем измерения времени задержки прихода сигнала одного приемника давления относительно другого и имеет множество алгоритмов [4]. Несмотря на большое распространение таких методов, в литературе основным направлением развития является уменьшение влияния отражений звуковых волн в помещении на работу системы. При этом точностным характеристикам локализации источника звука, которые в отсутствии внешних шумов и отражений в помещении (для систем TDOA) могут достигать ![]() , уделяется небольшое внимание. Тем не менее, как для адаптивных систем [2], так и систем TDOA, точностные характеристики локализации ИЗ являются одними из основных и могут быть основополагающими при выборе алгоритмов.
, уделяется небольшое внимание. Тем не менее, как для адаптивных систем [2], так и систем TDOA, точностные характеристики локализации ИЗ являются одними из основных и могут быть основополагающими при выборе алгоритмов.
В работе [5] предложена микрофонная система с адаптивным управлением ХН, её структура показана на рис. 1.
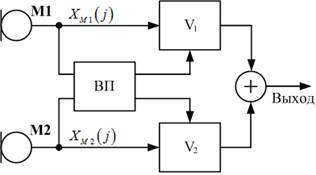
Рис. 1. Структура микрофонной системы с адаптивным алгоритмом управления характеристикой направленности
Она состоит из двух двунаправленных микрофонов M1 и M2, размещенных в одной точке пространства, а также процессора (ВП) предназначенного для расчета весовых коэффициентов. ХН микрофонов такой системы располагаются перпендикулярно друг другу. Для изменения положения двунаправленной («восьмерки») ХН выполняется весовая обработка сигналов с выходов двух микрофонов, после чего производится их сложение. Положение ХН при этом определяется значениями весовых коэффициентов ![]() .
.
Целью работы является экспериментальное исследование погрешности локализации одного ИЗ в условиях отсутствия внешних шумов и отражений сигнала источника.
Адаптивный алгоритм управления ХН, предложенный в работе [5], основан на пространственно-временной обработки сигналов с выходов двух направленных микрофонов. Расчет угла положения ИЗ выполняется на основе характеристического уравнения собственных значений корреляционной матрицы
![]() , (1)
, (1)
где ![]() – матрица собственных векторов,
– матрица собственных векторов, ![]() - корреляционная матрица входного сигнала,
- корреляционная матрица входного сигнала, ![]() – диагональная матрица собственных значений корреляционной матрицы
– диагональная матрица собственных значений корреляционной матрицы ![]() , внедиагональные элементы которой равны нулю. Для решения уравнения (1) необходимо найти собственные значения
, внедиагональные элементы которой равны нулю. Для решения уравнения (1) необходимо найти собственные значения ![]() корреляционной матрицы
корреляционной матрицы ![]() , которые находятся из характеристического уравнения второго порядка
, которые находятся из характеристического уравнения второго порядка
![]() .
.
Здесь ![]() – единичная матрица с нулевыми внедиагональными элементами,
– единичная матрица с нулевыми внедиагональными элементами, ![]() – матрица с нулевыми элементами. Подставляя в выражение (1) полученные значения
– матрица с нулевыми элементами. Подставляя в выражение (1) полученные значения ![]() и, решая это уравнение, находят матрицу собственных векторов
и, решая это уравнение, находят матрицу собственных векторов ![]() . Информация о положении ИЗ содержится в первом столбце матрицы
. Информация о положении ИЗ содержится в первом столбце матрицы ![]() . Угол положения ИЗ находится из выражения
. Угол положения ИЗ находится из выражения
![]() или
или ![]() , где
, где ![]() и
и ![]() верхний и нижний соответственно элемент (весовой коэффициент) первого столбца матрицы
верхний и нижний соответственно элемент (весовой коэффициент) первого столбца матрицы ![]() .
.
Экспериментальное исследование погрешности локализации ИЗ проводилось в математическом пакете MathCAD. Для этого сформирован дискретный случайный процесс ![]() с нормальным законом распределения, дисперсией
с нормальным законом распределения, дисперсией ![]() и нулевым математическим ожиданием. Характеристика направленности для предложенной структуры (см. рис.1) описывается функциями
и нулевым математическим ожиданием. Характеристика направленности для предложенной структуры (см. рис.1) описывается функциями ![]() и
и ![]() , где
, где ![]() – ХН капсюля M1,
– ХН капсюля M1, ![]() – ХН капсюля M2,
– ХН капсюля M2, ![]() – угол прихода сигнала ИЗ. Отсюда, для заданного угла
– угол прихода сигнала ИЗ. Отсюда, для заданного угла ![]() сигналы на выходах M1 и M2 можно описать функциями
сигналы на выходах M1 и M2 можно описать функциями
![]() , (2)
, (2)
![]() . (3)
. (3)
По предложенному алгоритму [4] рассчитываются статистические характеристики процессов ![]() ,
, ![]() и вычисляется угол
и вычисляется угол ![]() .
.
Погрешность определения угла положения ИЗ (угла ![]() ) может зависеть от таких факторов как собственный шум микрофонной системы или уровня входного сигнала микрофонов, определяющие отношение сигнал/шум. Эти факторы определяются конструкцией и выбором элементной базы при построении микрофонной системы, поэтому в рамках этой работы исследована погрешность, вызванная неравномерностью частотной характеристикой чувствительности (ЧХЧ) микрофонной системы или отклонением чувствительностей микрофонов M1 и M2. Такая неравномерность может быть вызвана собственной неравномерностью ЧХЧ каждого микрофона, а также разбросом чувствительностей направленных микрофонов. Оценка абсолютной погрешности производилась для фиксированных значений
) может зависеть от таких факторов как собственный шум микрофонной системы или уровня входного сигнала микрофонов, определяющие отношение сигнал/шум. Эти факторы определяются конструкцией и выбором элементной базы при построении микрофонной системы, поэтому в рамках этой работы исследована погрешность, вызванная неравномерностью частотной характеристикой чувствительности (ЧХЧ) микрофонной системы или отклонением чувствительностей микрофонов M1 и M2. Такая неравномерность может быть вызвана собственной неравномерностью ЧХЧ каждого микрофона, а также разбросом чувствительностей направленных микрофонов. Оценка абсолютной погрешности производилась для фиксированных значений ![]() в диапазоне углов
в диапазоне углов ![]() и шагом
и шагом ![]() по выражению
по выражению
![]() ,
,
где ![]() угол полученный путем подстановки выражений (2) и (3) в уравнение (1),
угол полученный путем подстановки выражений (2) и (3) в уравнение (1), ![]() угол полученный путем замены (2) на
угол полученный путем замены (2) на
![]() ,
,
где ![]() описывает изменение чувствительности микрофона M1. На рис. 2 показана зависимость абсолютной погрешности
описывает изменение чувствительности микрофона M1. На рис. 2 показана зависимость абсолютной погрешности ![]() от угла прихода сигнала ИЗ
от угла прихода сигнала ИЗ ![]() для
для ![]() (сплошная линия),
(сплошная линия), ![]() (пунктирная линия) и
(пунктирная линия) и ![]() (штриховая линия).
(штриховая линия).
Рис. 2. Абсолютная погрешность определения угла положения источника звука
Из анализа рисунка следует, что абсолютная погрешность зависит от отклонения чувствительностей капсюлей M1 и M2, а также от угла ![]() . Максимальная погрешность характерна для углов
. Максимальная погрешность характерна для углов ![]() , которая для
, которая для ![]() не превышает
не превышает ![]() , для
, для ![]() –
– ![]() , для
, для ![]() –
– ![]() . Минимальное значение абсолютной погрешности, близкое к нулю, соответствует углам
. Минимальное значение абсолютной погрешности, близкое к нулю, соответствует углам ![]() .
.
Выражения (2) и (3) описывают идеальные ХН микрофонной системы. Для двунаправленных микрофонов минимальная чувствительность ХН определяется значением параметра глубины нуля. Для большинства микрофонов это значение составляет от 14 дБ до 26 дБ и зависит как от группы сложности микрофона, так и от частоты на которой получена ХН [6]. Учитывая это, для значений углов ![]() выражение (3) записывается в виде
выражение (3) записывается в виде
![]() , (4)
, (4)
где ![]() – значение глубины нуля ХН. Для углов
– значение глубины нуля ХН. Для углов ![]() функция (2) заменяется выражением (4). Путем подстановки этих выражений в (2) и (3), для четырех значений углов
функция (2) заменяется выражением (4). Путем подстановки этих выражений в (2) и (3), для четырех значений углов ![]() произведен анализ влияния значения глубины нуля ХН на погрешность определения угла местоположения ИЗ. Из него следует, что уменьшение значения глубины нуля для углов
произведен анализ влияния значения глубины нуля ХН на погрешность определения угла местоположения ИЗ. Из него следует, что уменьшение значения глубины нуля для углов ![]() приводит к увеличению абсолютной погрешности. Так, для значения глубины нуля 30 дБ погрешность не превышает
приводит к увеличению абсолютной погрешности. Так, для значения глубины нуля 30 дБ погрешность не превышает ![]() , при 20 дБ –
, при 20 дБ – ![]() , при 14 дБ –
, при 14 дБ –![]() . Таким образом, погрешность также зависит от изменения формы ХН, что накладывает дополнительные требования в подборе направленных микрофонов M1 и M2.
. Таким образом, погрешность также зависит от изменения формы ХН, что накладывает дополнительные требования в подборе направленных микрофонов M1 и M2.
В работе исследована погрешность определения угла положения ИЗ микрофонной системы с адаптивным алгоритмом управления ХН. В результате экспериментального исследования в математическом пакете MathCAD, получены зависимости погрешности определения угла положения ИЗ от угла прихода сигнала ИЗ. Из анализа этих зависимостей следует, что увеличение разности чувствительностей двух направленных микрофонов приводит к увеличению погрешности, максимальное значение которой характерно для углов прихода сигнала ИЗ ![]() . Таким образом, для погрешности
. Таким образом, для погрешности ![]() разность чувствительностей не должна превышать 2 дБ. В случае идеальной микрофонной системы, для которой значение (в децибелах) глубины нуля ХН стремится к бесконечности, для углов
разность чувствительностей не должна превышать 2 дБ. В случае идеальной микрофонной системы, для которой значение (в децибелах) глубины нуля ХН стремится к бесконечности, для углов ![]() погрешность минимальна и близка к нулю. С уменьшением значения глубины нуля ХН, для этих углов, происходит увеличение погрешности, которая достигает
погрешность минимальна и близка к нулю. С уменьшением значения глубины нуля ХН, для этих углов, происходит увеличение погрешности, которая достигает ![]() при значении глубины нуля ХН 14 дБ. С увеличением этого параметра погрешность уменьшается. Таким образом, для снижения погрешности, при построении предложенной микрофонной системы с адаптивным управлением ХН, необходимо тщательно подбирать по чувствительности пары направленных микрофонов ХН которых имеет стабильные параметры в рабочем диапазоне частот.
при значении глубины нуля ХН 14 дБ. С увеличением этого параметра погрешность уменьшается. Таким образом, для снижения погрешности, при построении предложенной микрофонной системы с адаптивным управлением ХН, необходимо тщательно подбирать по чувствительности пары направленных микрофонов ХН которых имеет стабильные параметры в рабочем диапазоне частот.
Литература
1. Федосов В.П., Кравченко Г.В. Адаптивная антенная решётка с автоматическим сканированием в приповерхностном отражающем слое. // Антенны, 2001, № 4(50). – С. 42-45.
2. Кириченко И.А., Старченко И.Б. Принцип адаптивного подхода к управлению характеристиками акустических систем. // Инженерный вестник Дона.2011.№4.
3. Муравьев И.В., Перцев Л.В., Исаенков Н.С. Обзор методов адаптивного использования спектра // Инженерный вестник Дона.2011.№3.
4. Benesty J., Chen J., Huang Y., Microphone Array Signal Processing. Berlin, Germany: Springer-Verlag, 2008. – 245 pp..
5. Мокрецов А.В. Двунаправленный микрофон с адаптивной характеристикой направленности. //Телекоммуникации. В печати.
6. А.П. Ефимов, А.В. Никонов, М.А. Сапожников, В.И. Шоров Акустика: Справочник. Под ред. М.А.Сапожкова. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1989. - 336 с.