Использование космических средств позиционирования при обработке аэро- и космической информации
Аннотация
Дата поступления статьи: 06.09.2013В статье рассмотрены теоретические основы и предложен алгоритм фотограмметрической обработки стереопары с привлечением в процесс вычислительных действий координат и высот точек фотографирования (центров проекций). Предполагается, что при выполнении аэрофотосъемки они зафиксированы системами ГЛОНАСС и GPS с надлежащей точностью. В основу алгоритма положена совместная реализация условий компланарности соответственных лучей стереопары и коллинеарности проектирующих лучей, проходящих через опорные геодезические точки. Полагая, что координаты точек фотографирования представлены в левой геодезической системе, исходные уравнения компланарности и коллинеарности приведены к виду, удобному для совместной фотограмметрической обработки плоских и пространственных координат соответственных точек стереопары. Совместная реализация условий компланарности и коллинеарности позволяет сократить необходимое для внешнего ориентирования модели число опорных точек до одной. Ее необходимо проектировать (закладывать, маркироать) на краю стереопары против ее середины
Ключевые слова: Фотограмметрия, стереопара, одиночная модель, условия компланарности и коллинеарности, элементы ориентирования, точки фотографирования, ГЛОНАСС, GPS, теория, алгоритм.
25.00.26 - Землеустройство, кадастр и мониторинг
25.00.34 - Аэрокосмические исследования земли, фотограмметрия
Фотограмметрические принципы измерений, получившие еще в начале двадцатого века полное признание, в настоящее время находят широкое применение в различных областях человеческой деятельности. Этому способствует и внедрение в фотограмметрическое производство новых технологий по сбору первичной информации о местности. Для получения качественных и высокоточных аэрофотосъемочных данных в настоящее время используются цифровые широкоформатные аэрофотокамеры. В России эксплуатируется около десяти таких съемочных систем компании Microsoft Vexcel [1]. Приведенные в литературе данные о исследовании материалов фототриангуляции по снимкам, полученным цифровыми камерами, свидетельствуют [2, 3] о заметном повышении точности окончательных результатов фотограмметрической обработки таких снимков.
Важное значение принадлежит фотограмметрическим методам при ведении мониторинга земель в целях информационного обеспечения государственного кадастра недвижимости [4]. В настоящее время государственный мониторинг земель является современным техническим направлением по обеспечению названного кадастра необходимыми графическими документами [5].
В какой бы области не использовались фотограмметрические принципы обработки аэро- и космической информации, окончательная продукция (планы, карты, профили, пространственные координаты и др.) извлекается из одиночной модели, построенной по паре перекрывающихся снимков. К тому же возникают ситуации, когда весь объект съемки изображается на одной стереопаре. Например, при крупномасштабной съемке небольших территорий, когда масштаб аэрофотосъемки в 10 и более раз мельче масштаба картографирования, вполне возможно, что достаточно объект снять на два снимка.
Рассмотрим один из возможных способов фотограмметрической обработки стереопары с использованием космических средств позиционирования в процессе аэрофотосъемки точек фотографирования (центров проекций). При надлежащей синхронизации спутниковых сигналов с работой затвора АФА и тщательном определении элементов приведения спутниковой антенны относительно центра проекции (S) аэрофотоаппарата координаты точек фотографирования заменят или уменьшат число необходимых опорных точек для внешнего ориентирования стереопары. Заметим, что системы ГЛОНАСС и GPS уже используются не только для прокладки аэрофотосъемочных маршрутов [6], но и при фотограмметрической обработке снимков [7], где они используются в качестве опорных геодезических точек. Для одиночной стереопары их целесообразно включить в совместную реализацию условий компланарности и коллинеарности, что и сделано в данной публикации.
Согласно утвердившейся в последние годы концепции обработку изолированной стереопары целесообразно вести посредством объединения взаимного и внешнего ориентирования снимков в единый вычислительный процесс. Для реализации этого принципа воспользуемся известными в фотограмметрии уравнениями, связывающими измеренные на снимках плоские координаты точек с их значениями в системе координат местности. Параметрами этих связей являются элементы внутреннего и внешнего ориентирования снимков. Элементы внутреннего ориентирования, определяющие положение центра проекции снимка относительно его системы координат (х0, у0, f), как правило, известны, остальные (шесть) – подлежат определению. Часть из них можно найти посредством совместной обработки перекрывающихся снимков, т.е. без использования каких-либо геодезических измерений на местности, оставшиеся (элементы внешнего ориентирования) определяют по координатам и высотам опорных точек или на основе других геодезических измерений на местности (линейных, угловых, высотных и др.).
Рассмотрим теоретические основы и алгоритм фотограмметрической обработки пары перекрывающихся снимков для вычисления координат и высот определяемых точек. Полагая известными элементы внутреннего ориентирования снимков, представим остальные в следующем виде: ХS1, УS1, ZS1, ХS2, УS2, ZS2, α1, ω1, χ1, α2, ω2, χ2. Первые шесть – это координаты точек фотографирования в геодезической (левой) системе. Будем считать их известными величинами, определенными в процессе выполнения аэрофотосъемки местности космическими средствами позиционирования (системами ГЛОНАСС, GPS). В качестве определяемых неизвестных осталось шесть угловых элементов. Как было отмечено выше, пять из них, определяющих взаимное положение снимков с точностью до параллельного переноса, также не нуждаются в геодезических измерениях на местности. Следовательно, для внешнего ориентирования модели сфотографированного объекта достаточно иметь одну опорную точку с координатами Х, У, Z или (вместо нее) выполнить небольшой объем вспомогательных геодезических измерений (например, измерить превышение между надежно опознаваемыми на снимке точками, или определить их высоты). При гидрологических изысканиях можно воспользоваться зеркалом водной поверхности или выходами подземных вод (в болотистой местности).
Необходимо заметить, что в последние годы наряду с указанными выше угловыми элементами α, ω, χ используется система ω, α, χ, направляющие косинусы которой имеют иную математическую интерпретацию. Однако, учитывая исследования профессора И.Т. Антипова [8], при плановой аэрофотосъемке традиционная система угловых элементов внешнего ориентирования снимка имеет определенные преимущества, что и обусловило ее использование.
Для теоретического обоснования технологии фотограмметрической обработки стереопары воспользуемся известными в фотограмметрии и высшей математике зависимостями. Одна из этих зависимостей фиксирует факт расположения соответственных лучей в момент съемки в одной плоскости. Ее называют базисной, и она проходит через точки фотографирования (центры проекций) и точку местности. Действительно, и рис. 1 подтверждает данный факт, т.е. в момент фотографирования центры проекции и точка местности образуют базисную плоскость.
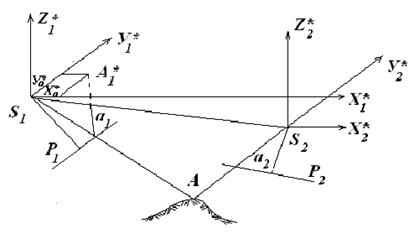
Рис. 1. – Стереопара снимков:
S1, S2 – точки фотографирования; Р1, Р2 – левый и правый снимки;
а1, а2 – изображения на снимках одной и той же точки местности А (соответственные точки); S1а1, S2а2 – соответственные лучи;
Ха2*,Уа2*, Zа2*- пространственные координаты точки а2 на правом снимке стереопары
Однако, не это главное, так как любые три точки, не лежащие на одной прямой, образуют треугольник. Важно другое: в этой базисной плоскости в момент съемки лежали и проектирующие лучи S1a1 и S2a2, а это уже четыре точки. Вот именно этот факт и положен в основу определения угловых элементов внешнего ориентирования снимков. Математическая интерпретация факта расположения проектирующих лучей в одной базисной плоскости вытекает из компланарности векторов ![]() и
и ![]() , смешанное произведение которых равно нулю. В координатной форме условие компланарности векторов выглядит так:
, смешанное произведение которых равно нулю. В координатной форме условие компланарности векторов выглядит так:
 , (1)
, (1)
где
 (2)
(2)
а Х *, У*, Z* – пространственные координаты соответственных (идентичных) точек на снимках (на рис. 1 они показаны для точки а1 левого снимка стереопары.
Пространственные системы координат (S1Х1*У1*Z1* и S2Х2*У2*Z2*) назначены так, чтобы оси их абсцисс были параллельны оси ординат геодезической системы [9], в которой определены координаты точек фотографирования (ХS, УS, ZS).Для согласования плоской системы координат снимков (правой) с геодезической (левой) в определителе (1) поменялись местами базисные компоненты ВХи ВУ.
Условия компланарности позволяют определить лишь пять из шести угловых элементов внешнего ориентирования стереопары. Для определения последнего неизвестного воспользуемся условием коллинеарности, учитывая тот факт, что в момент фотографирования центр проекции, точка местности и ее изображение на снимке лежали на одной прямой. В координатной форме это условие запишем так:
 (3)
(3)
где пространственные координаты точек с измеренными на снимке плоскими связаны известными зависимостями
 (4)
(4)
в которых х0, у0 и f – элементы внутреннего ориентирования снимков (известные величины), аi, bi и сi – направляющие косинусы – суть функции угловых элементов внешнего ориентирования снимка.
Таким образом, исходными уравнениями для определения угловых элементов внешнего ориентирования (ЭВО) будут условия компланарности (1) и коллинеарности (3). Для их реализации воспользуемся методом Ньютона, т.е. через приближенные значения неизвестных. Этот метод вынужден, так как, во-первых, имеем дело с нелинейными (тригонометрическими) уравнениями, а во-вторых, он дает возможность использовать для решения задачи избыточные измерения.
Пусть нам известны приближенные значения неизвестных. Обозначим их (α1), (ω1), (χ1), (α2), (ω2), (χ2), а поправки к ним – δα1, δω1, δχ1, δα2, δω2, δχ 2. Тогда определитель (1) после его разложения по элементам первой строки и с учетом указанного выше метода реализации примет следующий вид:

Введем следующие обозначения:
Численная величина свободного члена l равна определителю (1) после подстановки в него приближенных значений неизвестных.
С учетом обозначений уравнение поправок примет вид
![]() (5)
(5)
Найдем частные производные, для чего нам потребуются зависимости между направляющими косинусами и угловыми ЭВО, т.е.
 (6)
(6)
Для вычисления частных производных функции (1) сначала найдем их значения применительно к направляющим косинусам. Например, для а1 будем иметь
![]()
Аналогично находятся и остальные производные. Приведем их окончательные значения:
 (7)
(7)
Вычисленные значения частных производных используем для дифференцирования пространственных координат точек (Х*,У*, Z*). Возьмем, например, частную производную ![]() (формулы (4)):
(формулы (4)):
![]()
По аналогии:
 (8)
(8)
Наконец, вычислим коэффициенты уравнений поправок (5), переписав определитель (1) в следующем виде:
![]()
![]()
В качестве примера вычислим коэффициент а:

Подставив в последнее выражение значения частных производных из формул (8) и поступая аналогично для вычисления остальных коэффициентов, окончательно получим
где
для левого снимка стереопары,
для правого.
Таким образом, для составления уравнений поправок (5) сначала вычисляются направляющие косинусы для левого (аi, bi, ci) и правого ![]() снимков стереопары, а по ним и формулам (4) – пространственные координаты соответственных точек стереопары
снимков стереопары, а по ним и формулам (4) – пространственные координаты соответственных точек стереопары ![]() Для первого приближения можно принять
Для первого приближения можно принять ![]() . Так как угловой элемент χ может принимать значения от 0 до 360°, то его величину надо определять как горизонтальный угол между осью ординат геодезической системы и направлением маршрута съемки (см. рис. 2).
. Так как угловой элемент χ может принимать значения от 0 до 360°, то его величину надо определять как горизонтальный угол между осью ординат геодезической системы и направлением маршрута съемки (см. рис. 2).
Достаточно это сделать по топографическому плану или использовать для его вычисления дирекционный угол базиса фотографирования (S1S2) из решения обратной геодезической задачи на плоскости.
В технологии фотограмметрической обработки снимков принято правым считать тот снимок, ордината УS у которого больше, чем у другого центра проекции (принцип «слева на право»). Тогда дирекционный угол направления базиса фотографирования (αS1S2) будет изменяться лишь от 0 до 180°. С учетом этого правила упрощается и процесс определения χ.
Если α < 90°, то (χ1) = (χ2) = 90°– α.
Если же 180° > α > 90°, то (χ1) = (χ2) = 450°– α.
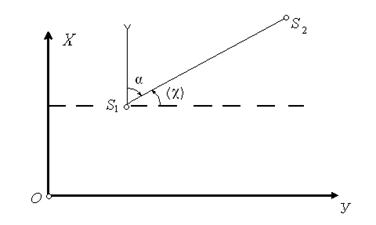
Рис. 2. – К определению (χ)
Каждая изобразившаяся на обоих снимках точка с измеренными плоскими координатами х1, у1, х2, у2 позволяет составить одно уравнение (3) с шестью неизвестными. Однако, даже шесть и более подобных уравнений не решат задачу по определению всех угловых ЭВО, так как взаимное положение снимков определяют лишь пять параметров. Поэтому нужны геодезические измерения на местности. Пусть ими будут геодезические координаты (Х, У, Z) хотя бы одной опорной точки. Тогда, по аналогии с условием компланарности, уравнения поправок можно записать так:
 (9)
(9)
где
где Х, У, Z – геодезические координаты опорной точки, (Х1), (У1), (Х2), (У2) – приближенные значения координат опорных точек, вычисленные по формулам (3) с привлечением (α1), (ω1), (χ1) левого и (α2), (ω2), (χ2) правого снимков.
Уравнения поправок (5) и (9) объединяют общие неизвестные δα1, δω1, δχ1, δα2, δω2 и δχ2, что позволяет решать их совместно. При этом условий компланарности должно быть не менее пяти. Как видим, даже при одной опорной точке получаем девять уравнений, поэтому решать их следует с использованием метода наименьших квадратов.
Поскольку определяемые неизвестные далеки от их истинных значений, то они вычисляются методом последовательных приближений. После каждого из них коэффициенты уравнений поправок и свободные члены подсчитываются по уточненным из предыдущей итерации угловым ЭВО. Прекращение вычислительного процесса происходит тогда, когда свободные члены уравнений поправок станут пренебрегаемо малыми. Обычно достаточно 6-8 приближений для достижения этой цели, если нет погрешностей в результатах фотограмметрических и геодезических измерений. При наличии избыточных измерений можно ожидать, что ошибка содержится в том измерении, присутствие которого в соответствующем уравнении поправок после 6-8 приближений привело к недопустимому значению свободного члена. Выявив эту погрешность, рекомендуется исключить из уравнений поправок данное уравнение и повторить вычислительный процесс. Уравненные значения угловых ЭВО позволяют вычислить геодезические координаты определяемых точек по формулам прямой фотограмметрической засечки, которые имеют следующий вид:
где
![]()
При использовании избыточных опорных геодезических точек их следует располагать по углам стереопары, что повысит точность окончательных результатов, тем самым позволит с запасом точности готовить графические материалы для государственного кадастра недвижимости. Нормативные требования [10] к этим документам аналогичны требованиям к картографическим материалам крупных масштабов.
Литература:
1. Ковров А.А. Новые технологии компании Microsoft Vexcel по сбору и обработке данных аэросъемки [Текст] // Геопрофи, 2012. – №2. – С.12-14.
2. Wang Cheng – long. Aerotriangulation accuracy analysis of GPS-assisted aerial photogrammetry based on SWDC // Cehui kexue = Sci. Surv. and Mapping, 2011. 36. – № 2. – C.101-103. Кит.; рез. англ.
3. Geng Xun, Yang Tina-ke, Miao Tian. Research on datum transformation for the aerial photogrammetry of airborne three – line CCD skanner // Cehui kexue = Sci. Surv. and Mapping, 2010. 35. – № 4. – C.65-67. Кит.; рез. англ.
4. Лимонов, А.Н. Совершенствование технологических процессов создания цифровых моделей местности по материалам аэрофотосъемки [Текст]: Монография / А.Н. Лимонов, Л.А. Гаврилова, А.И. Обиралов. – М.: ГУЗ, 2006. – 80 с.
5. Добрынин Н.Ф., Пыдык М.А. Теоретические основы нового метода корректуры базовых планов земель на основе геометрических свойств одиночного снимка [Текст] // Бюллетень Союза геодезистов, 2011. – №5. – С.17-21.
6. Маркина, Ю.И. Антенна GPS круговой поляризации в диапозоне 1,2-1,6 ГГц [Электронный ресурс] // «Инженерный вестник Дона», 2012, №3. – Режим доступа: http://www.ivdon.ru/magazine/archive/n3y2012/917 (доступ свободный) – Загл. с экрана. – Яз. рус.
7. Мышляева В.А., Кекелидзе В.Б., Тюкавкин Д.В. Использование координат центров фотографирования при аэрофотосъемке линейных объектов [Текст] // Геодезия и картография, 2006. – №3. – С.34-38.
8. Антипов И.Т. Об использовании угловой ориентировки снимков [Текст] // ГЕО-Сибирь – 2006: Сборник материалов Международного научного конгресса, Новосибирск, 24-28 апреля 2006. Т.3. Мониторинг окружающей среды, геоэкология, дистанционные методы зондирования Земли и фотограмметрия. Ч.1. – Новосибирск: СГГА, 2006. – С.52-58.
9. Куштин, В.И. Преобразование координат, используемых в геодезии [Электронный ресурс] // «Инженерный вестник Дона», 2012, №4-2. – Режим доступа: http://www.ivdon.ru/magazine/archive/n4p2y2012/1240 (доступ свободный) – Загл. с экрана. – Яз. рус.
10. Энциклопедия кадастрового инженера [Текст]: учебное пособие / Под ред. М.Н. Петрушиной. – М.: Кадастр недвижимости, 2007. – 656 с.