Динамический анализ манипуляторов кузовных мусоровозов
Аннотация
В статье представлены результаты исследований колебательного характера работы мусоровоза в технологическом режиме. Установлен характер свободных колебаний рамы автомобиля, угла подъема манипулятора и их влияние на формирование усилий в системе «захват-бак-захват» с учетом затухания.
Ключевые слова: мусоровоз, манипулятор, захват, свободные затухающие колебания, формирование усилий
05.05.04 - Дорожные, строительные и подъемно-транспортные машины
В настоящее время основы инженерного расчета и проектирования отдельных подсистем, рабочих органов и в целом автомобилей для сбора и вывоза твердых бытовых отходов базируются на известных положениях теоретической механики, сопротивления материалов, теории механизмов и машин и теории автомобилей. Существующая методика расчета манипулятора включает определение характеристик расчетных положений, кинематический и динамический анализ системы и прочностной расчет конструкции без учета подвижности рамы автомобиля [1].
Для описания и учета колебаний мусоровоза в рабочем режиме составлены расчетная схема (рис. 1), дифференциальные уравнения колебательных движений рамы автомобиля и манипулятора с контейнером с использованием уравнений Лагранжа II рода и получена зависимость угла колебаний рамы за рабочий цикл манипулятора. Для определения амплитудно-частотных характеристик составлено уравнение колебаний манипулятора с учетом колебаний рамы автомобиля в рабочем режиме и получена зависимость изменения угла подъема манипулятора за рабочий цикл мусоровоза при различной загрузке кузова [2].
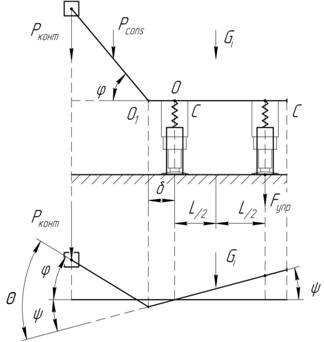
Рис. 1. Колебательная система мусоровоза
Полученные зависимости не учитывают демпфирования, т.е. колебания являются незатухающими. Практически в процессе колебаний всегда происходит рассеяние энергии и, поэтому, свободные колебания являются затухающими.
Согласно теории эксплуатационных свойств автомобилей силы сопротивления, вызывающие превращение механической энергии в теплоту, что приводит к затуханию колебаний, возникают в результате работы амортизаторов, межлистового трения в рессорах, трения во втулках, шарнирах и др., а также в результате деформаций шин. Силы сопротивления подвески значительно больше, чем силы сопротивления, вызывающие гашение колебаний в шинах, поэтому учитывается только рассеяние энергии в подвеске. Силы сопротивления подвески принимаются пропорциональными скорости колебаний [3, 4].
С учетом вышесказанного определены силы сопротивления подвески и составлены дифференциальные уравнения свободных колебаний рамы автомобиля с учетом затухания
где l – длина манипулятора, м; g – ускорение свободного падения, м/с2; Рcons – масса манипулятора, Н; Рконт – масса контейнера, Н; φ- угол подъема манипулятора, рад; Ψ - угол колебаний рамы автомобиля, рад; δ - расстояние от оси крепления манипулятора к раме автомобиля до оси аутригера, м; Gi – масса мусоровоза, Н; L - расстояние между рессорами автомобиля, м; с – жесткость подвески автомобиля, Н/м2; βΨ’ – момент сил сопротивления вращению рамы автомобиля.
Складывая, получаем
![]() , (1)
, (1)
где  ,
,
здесь Ψ0 – начальный угол отклонения рамы автомобиля.
Из условия статического равновесия
![]() .
.
Неоднородное дифференциальное уравнение (1) имеет общее решение
![]() ,
,
где Ψ1 – общий интеграл однородного дифференциального уравнения
![]() (2)
(2)
и имеет вид
![]() ; (3)
; (3)
Ψ2 – частное решение неоднородного дифференциального уравнения
![]()
Из (1) ![]() , откуда
, откуда
![]() . (4)
. (4)
С учетом (3) и (4)
![]() . (5)
. (5)
Характеристическое уравнение для (2) имеет вид
![]() .
.
Его корни ![]() ,
,
где
 .
.
Константы А и D в общем решении (5) находим по начальным условиям: при t=0 считаем, что Ψ=Ψ0, а Ψ’0=0. Для этого из (5) находим
![]() . (6)
. (6)
Подставляя начальные условия в уравнения (5) и (6), получаем
 .
.
Решение уравнения (5) позволило установить зависимость угла колебаний рамы автомобиля за рабочий цикл манипулятора (рис. 2).
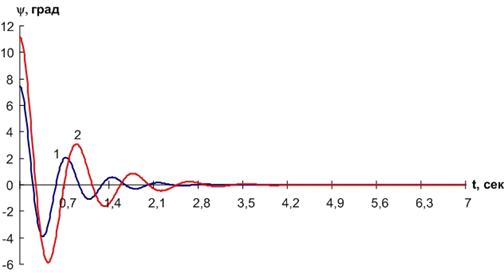
Рис. 2. Свободные затухающие колебания рамы мусоровоза в технологическом режиме:1 – для пустого мусоровоза; 2 – при полной загрузке мусоровоза
С учетом свободных затухающих колебаний рамы мусоровоза получена зависимость изменения угла подъема манипулятора (7) за рабочий цикл мусоровоза (рис. 3)
![]() , (7)
, (7)
где ϖ - угловая скорость подъема манипулятора, рад/с; t – время рабочего цикла подъема манипулятора, с.
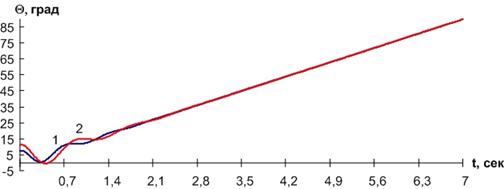
Рис. 3. Амплитудно-частотная характеристика манипулятора мусоровоза:1 – для пустого мусоровоза; 2 –при полной загрузке мусоровоза
Для расчетных схем формирования нагрузок в системе «захват – бак – захват» (рис. 4) получены зависимости изменения величины усилий в элементах конструкции захвата за рабочий цикл работы манипулятора с учетом свободных затухающих колебаний рамы мусоровоза (рис. 5).
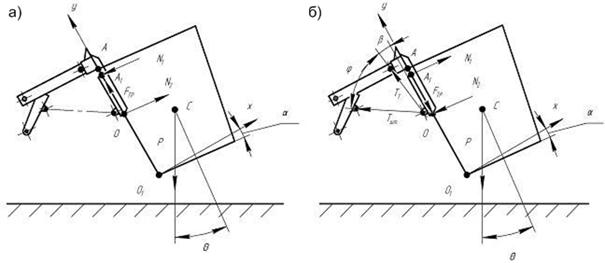
Рис. 4. Схема действия сил в системе «захват-бак-захват»:
а) – со стороны захвата на бак; б) – со стороны бака на захват
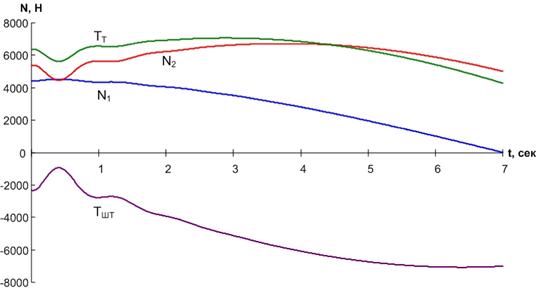
Рис. 5. Усилия в элементах конструкции серийного захвата при загрузке полного контейнера в полный мусоровоз
С целью уменьшения действующих усилий в элементах конструкции захвата, повышения надежность его работы и предотвращения деформации стенок контейнера разработана конструкция захвата [5], обеспечивающая подхват контейнера под днище.
Для определения нагрузок, возникающих в элементах новой конструкции захвата, разработаны расчетные схемы (рис. 6) и составлены уравнения равновесия действия сил со стороны захвата на стенку бака (8) и равновесия сил, действующих со стороны бака на захват (9).
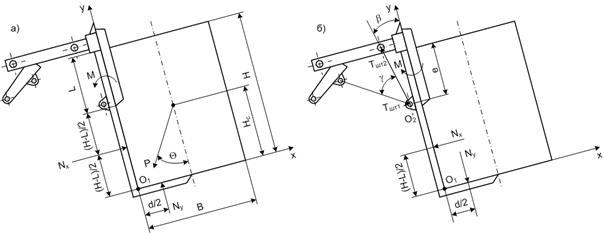
Рис. 6. Расчетные схемы сил в системе «захват-бак-захват» для новой конструкции захвата:а) – со стороны захвата на бак; б) – со стороны бака на захват
 (8)
(8)
 (9)
(9)
где Nx,Ny – нормальные давления на стенку и днище контейнера соответственно, Н; Р – вес контейнера , Н; В – ширина контейнера, м; d – длина подхвата под днище контейнера, м; Нс – высота центра масс контейнера, м; Н – высота контейнера, м;L – длина «вилочной» планки захвата, погружаемой в контейнер, м; ТШТ1 – усилие, действующее на шток гидроцилиндра прижима, Н; ТШТ2– усилие, действующее на шток управляющего гидроцилиндра, Н; β – угол наклона управляющего гидроцилиндра к оси Y, рад; g– угол между осями гидроцилиндров, рад; e – расстояние от верхнего края контейнера до точки крепления штоков гидроцилиндров, м.
Решение уравнений (8) и (9) позволяет оценить изменение величины усилий в элементах конструкции захвата за рабочий цикл работы манипулятора с учетом колебаний платформы мусоровоза (рис. 7).
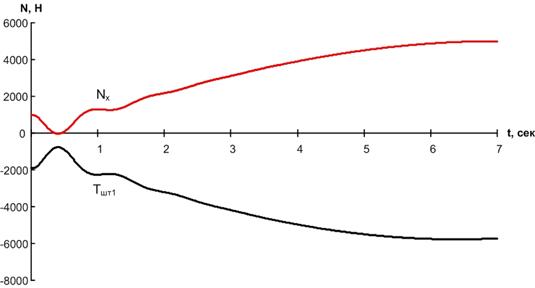
Рис. 7. Усилия в элементах новой конструкции захвата при загрузке полного контейнера в полный мусоровоз
Полученные зависимости показывают, что при использовании предлагаемой конструкции захвата нагрузки, возникающие в системе «захват-бак-захват» уменьшаются в разных фазах цикла работы манипулятора от 1,2 до 5,5 раз.
Результаты работы получены при поддержке Минобрнауки РФ в рамках государственного задания на проведение НИОКР, шифр заявки № 7.1256.2011.
Список литературы
1. Ермилов А.Б. Расчет и проектирование спецавтомобилей для сбора и вывоза твердых бытовых отходов: Учебное пособие / МАДИ.- М., 1983. – 99 с.
2. Конструкции и рабочие процессы манипуляторов кузовных мусоровозов / Р.В.Каргин, О.С.Мирошниченко // Известия вузов. Северо-Кавказский регион. Технические науки. 2010. № 6. С. 75-78.
3. Литвинов А.С. Управляемость и устойчивость автомобиля / А.С. Литвинов. – М.: Машиностроение, 1971. – 416 с.
4. Метод снижения вибронагруженности колеса легкового автомобиля / С.Л.Горин, П.В.Харламов // Вестник Ростовского государственного университета путей сообщения. 2011. № 1. С. 12-17.
5. Патент RU 2400417 С1 МПК B65 F3/04. Захват устройства для разгрузки контейнеров в кузов мусоровоза / А.С.Носенко, Р.В.Каргин, М.С.Алтунина, О.С.Мирошниченко. – Заявл. 10.03.2009. Опубл. 27.09.2010, Бюл. № 27.